

 联系我们
联系我们

爱普生机器人四个活动关节的脉冲范围
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除。
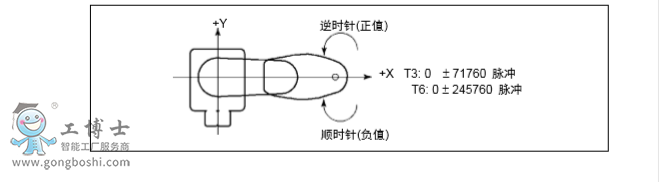
爱普生机器人第1关节*大脉冲范围 第1关节的0脉冲位置是指第1机械臂朝向X坐标轴正方向的位置。 从0脉冲位置向逆时针方向的为正脉冲值,向顺时针方向的为负脉冲值。

爱普生机器人第2关节*大脉冲范围 第2关节的0脉冲位置是指第2机械臂与第1机械臂成一条直线时的位置。 (第1机械臂朝向任何方向都是如此。) 从0脉冲位置向逆时针方向的为正脉冲值,向顺时针方向的为负脉冲值。

爱普生机器人第3关节*大脉冲范围 第3关节的0脉冲位置是指轴的上限位置。 第3关节从0脉冲位置下降时,必定会变为负脉冲值。

更多资讯: 爱普生机器人